Die Staubsaugerroboter von Xiaomi erfreuen sich großer Beliebtheit, da sie sehr gut in der Erkennung von Räumen sind (merken sich Karten, fahren gezielt die Räume ab statt zufällig), die Reinigung super ist (Staubsaugen & Wischen möglich) und zusätzlich noch relativ günstig sind. Leider haben sie aber auch einen Nachteil, viele der Daten (Sensordaten, Steuerung usw.) werden über die Cloud, teilweise sogar über chinesische Server geleitet. Wer das nicht will, kann auf das Projekt Valetudo zurückgreifen. Dabei handelt es sich um eine spezielle Firmware, die auf dem Staubsaugerroboter installiert wird und verhindert, dass dieser "nach Hause" telefoniert. Valetudo unterstützt vor allem den Xiaomi Roborock V1 und S5(x), mehr Infos dazu finden sich auch hier. Wen die Cloud-Anbindung nicht stört, bzw. wer ein nicht unterstütztes Modell des Staubsaugerroboters von Xiaomi besitzt, kann auch das Plugin MiRobot2Lox des Loxberry einsetzen.
Installation von Valetudo
Als erstes sollte genau geprüft werden, welches Modell man einsetzt und ob dies mit Valetudo kompatibel ist. Beim Roborock S5x (Gen 2) gilt es auch das Produktionsdatum zu beachten. Alle Infos hierzu finden sich hiert: https://valetudo.cloud/pages/knowledge_base/supported-roborock-devices.html
Als nächstes muss Valetudo auf dem Staubsaugerroboter installiert werden. Wie dies geht, findet Ihr hier: https://valetudo.cloud/pages/installation/roborock-ota.html Nutzt am besten Dennis's Dustbuilder (siehe Anleitung) um euch den Buildprozess und das Erstellen der SSH-Keys zu ersparen. Die von mir getestete Firmware-Version ist Valetudo 0.6.1, diese funktioniert garantiert mit dieser Anleitung. Nachdem die neue Firmware installiert ist, verbindet den Staubsaugerroboter mit eurem WLAN, so dass auch Loxone darauf zugreifen kann (siehe Anleitung letzter Absatz "Connect your robot to your Wifi").
Ersteinrichtung via Webinterface
Verbindet Euch zum Webinterface (Aufruf http://ip-des-Staubsaugerroboters) und schaut Euch etwas um. Am besten Ihr aktiviert unter Settings→Persistent Data (nur beim Roborock S5x) das Speichern der Karte, dadurch verliert der Staubsaugerroboter auch nach einem Neustart die Karte nicht und alle Zonen bleiben erhalten. Wen es stört, kann unter Settings→Sound & Voice die Sprachausgabe leise stellen, oder neue Sprachpakete installieren.
Lasst den Staubsaugerroboter 1x das komplette Stockwerk reinigen, damit er seine Karte initial erstellt. Dazu auf Home→Start klicken oder die mittlere, große Taste am Staubsaugerroboter drücken. Anschließend findet Ihr unter dem Menüpunkt Map die Karte der Räume (dies kann auch schon während des Einlernens beobachtet werden).
Anlegen von Zonen
Unter dem Menüpunkt Zones im Webinterface können anschließend verschiedene Reinigungszonen erstellt werden. Diese Zonen dienen dazu, dass der Staubsaugerroboter später nur einen bestimmten Bereich und nicht alles reinigt. Hier empfiehlt es sich gleich die gewünschten Zonen zu erstellen (Küche, Esszimmer, Wohnzimmer usw.), damit diese später aus Loxone heraus angesprochen werden können.
Anlegen von GoTo Locations
Wer möchte kann auch noch sogenannte GoTo Locations anlegen. Bei Bedarf kann man darüber den Staubsaugerroboter später an die gewünschte GoTo Location schicken. Dies ist z. B. dann sinnvoll, falls die Ladestation schlecht zugänglich ist (z. B. unter einer Treppe) und man eine Wartungsposition zum Entleeren des Schmutzbehälters benötigt.
Einbinden in Loxone
Valetudo bringt eine REST-API mit, die vor allem das Webinterface nutzt um mit dem Staubsaugerroboter zu kommunizieren. Allerdings kann die REST-API auch von jedem anderen Client im Netzwerk, also auch von Loxone, angesprochen werden.
Steuern des Staubsaugerroboters
Sie nachfolgenden Befehle können mit Tools wie z. B. Postman bei Bedarf auch vorab getestet werden.
| Befehl | URL | HTTP Methode | Body | Header |
|---|---|---|---|---|
| Komplette Reinigung starten | http://ip-des-Staubsaugerroboters/api/start_cleaning | PUT | ||
| Reinigung einer oder mehrerer Zonen starten | http://ip-des-Staubsaugerroboters/api/start_cleaning_zones_by_id | PUT | Zonen-ID(s) z. B. [1] oder [1,2] Abruf der Zone-IDs unter: http://ip-des-Staubsaugerroboters/api/zones | Content-Type: application/json |
| Reinigung pausieren | http://ip-des-Staubsaugerroboters/api/pause_cleaning | PUT | ||
| Reinigung stoppen | http://ip-des-Staubsaugerroboters/api/stop_cleaning | PUT | ||
| Zur Ladestation fahren | http://ip-des-Staubsaugerroboters/api/drive_home | PUT | ||
| Zu bestimmter Position fahren | http://ip-des-Staubsaugerroboters/api/go_to | PUT | Koordinaten z. B. {"x":2539,"y":2474} Abruf der Koordinaten der GoTo Locations unter: http://ip-des-Staubsaugerroboters/api/spots | Content-Type: application/json |
Auslesen der aktuellen Statuswerte
Die nachfolgenden Befehle können auch im Browser aufgerufen werden, um zu sehen, welche Variablen zur Verfügung stehen.
| Befehl | URL | HTTP Methode |
|---|---|---|
| Allgemeiner Status (Aktiv, Ladezustand, usw.) | http://ip-des-Staubsaugerroboters/api/state | GET |
| Verbrauchsstatus (Wechselzeitpunkt Verbrauchsmaterialien, Reinigungsdauer, usw.) | http://ip-des-Staubsaugerroboters/api/consumable_status | GET |
Loxone Config
Eine Vorlage in der alle Befehle und alle Statuswerte eingebunden sind, kann hier heruntergeladen werden: Valetudo.Loxone
Zum Steuern des Staubsaugerroboters mit den oben genannten Befehlen, reicht ein Virtueller Ausgang mit untergeordneten Virtuellen Ausgangs Befehlen. Beim Einlesen der Statuswerte muss jeweils ein Virtueller HTTP Eingang für den allgemeinen Status und den Verbrauchsstatus angelegt werden. Darunter werden die Virtuellen HTTP Eingangs Befehlen zur Erkennung der einzelnen Variablen (Ladezustand, Reinigungsdauer usw.) hinzugefügt.

Die zugehörige Konfiguration sieht dann folgendermaßen aus:
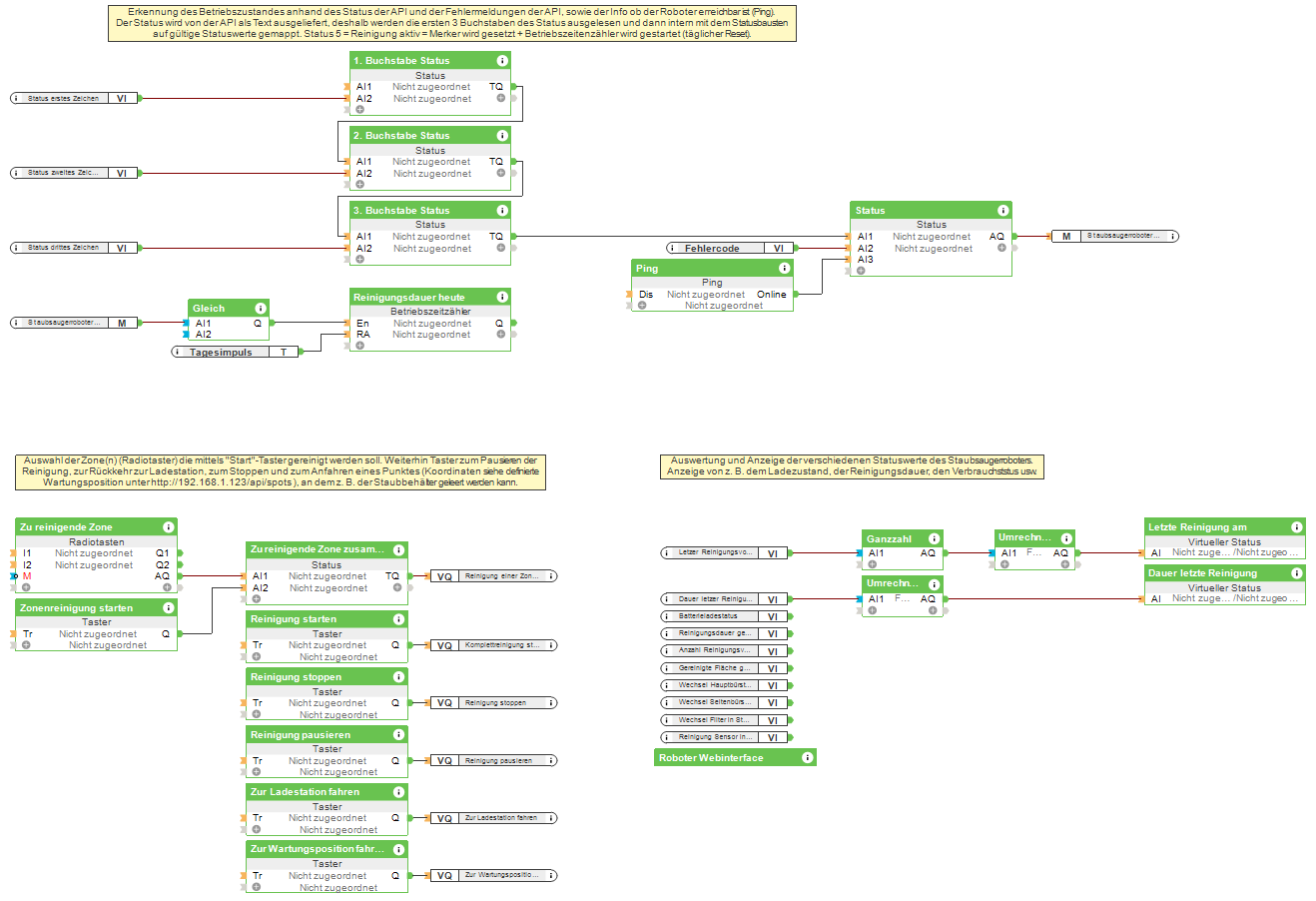
- Der Status (idle, cleaning, returning, ...) des Staubsaugerroboters wird nur als Text ausgegeben. Daher werden zur eindeutigen Erkennung die ersten 3 Buchstaben über die Statusbausteine "1.-3. Buchstabe Status" ermittelt und im Nachfolgenden Status-Baustein auf den aktuellen Status des Staubsaugerroboters gemappt. Dort fließen ebenfalls die Fehlercodes und eine Prüfung, ob der Staubsaugerroboter erreichbar ist (Ping-Baustein), mit ein.
- Im Radiotasten-Baustein "Zu reinigende Zone" und dem nachgelagerten Status-Baustein, können die Zonen hinterlegt werden, die in der Weboberfläche angelegt wurden (Abruf der Zonen IDs unter http://ip-des-Staubsaugerroboters/api/zones).
- Im Virtuellen Ausgangsbefehl "Zur Wartungsposition fahren" kann im Feld "HTTP-Post-Befehl bei EIN" die Position ({"x":2539,"y":2474}) der Wartungsposition angegeben werden, die in der Weboberfläche angelegt wurde (Abruf der Koordinaten der GoTo Locations unter http://ip-des-Staubsaugerroboters/api/spots).
Verwandte Artikel
Verwandte Artikel erscheinen hier basierend auf den Stichwörtern, die Sie auswählen. Klicken Sie, um das Makro zu bearbeiten und Stichwörter hinzuzufügen oder zu ändern.