Das Einbinden der Rasenmährobotersteuerung bietet mehrere Vorteile. Die Mähpläne können zentral mitverwaltet werden und der Rasenmähroboter kann sich nach den Abwesenheitszeiten richten. Weiterhin ist es möglich das Rasenmähen bei Regen abzubrechen wenn der Rasenmähroboter dafür über keine eigenen Sensoren verfügt.
Wichtig ist auch das Abbrechen des Rasenmähenvorgangs wenn jemand den Garten betritt, dies ist insbesondere bei Kindern und Tieren sinnvoll. Hierzu kann ein Außenbewegungsmelder oder ein Reedkontakt in der Terrassentür dienen.
Folgende Möglichkeiten einer Einbindung bestehen:
- Robonect
- Husqvarna Automower 105
- Husqvarna Automower 305
- Husqvarna Automower 308
- Husqvarna Automower 308X
- Husqvarna Automower 310
- Husqvarna Automower 315 mit extra Kabel
- Husqvarna Automower 320
- Husqvarna Automower 330X
- Husqvarna Automower 420
- Husqvarna Automower 430X
- Husqvarna Automower 450X
- Gardena R38Li
- Gardena R40Li
- Gardena R45Li
- Gardena R50Li
- Gardena R70Li
- Gardena R80Li
- Pritschet WLAN Modul
- Husqvarna Automower 220 AC,
- Husqvarna Automower 230 ACX
- Husqvarna Automower 265 ACX
- Husqvarna Automower Solar Hybrid
- Bosch Indego Connect. Verbindung über Internet und SIM Karte
(https://github.com/sbernhard/lox2indego, https://github.com/zazaz-de/iot-device-bosch-indego-controller , https://forum.fhem.de/index.php/topic,52143.0.html) - Bosch Indego Connect: lässt sich auch über Node-Red, mosquito Mqtt Broker und https://github.com/zazaz-de/iot-device-bosch-indego-controller über den Mqtt Adapter einbinden. Interface zu Loxone dann über HTTP Virtueller Eingang bzw Ausgang. Node-Red kann hierbei über den HTTP Node angesprochen werden. Mit node-red-contrib-httpauth lässt sich eine einfache Basic Auth implementieren. Siehe https://github.com/sbernhard/Node-Red-Indego für mehr Informationen.
- Bosch Indego 1000 Connect
- Gardena smart, Verbindung über Internet http://www.roboter-forum.com/showthread.php?16777-Gardena-Smart-System-Analyse
- Gardena smart Sileno
- Gardena smart Sileno+
Eine Einbindung von Modellen mit SIM Karte scheint momentan nicht möglich.
Zum Thema Robonect Modul einbinden:
- Hat man das robonect Modul fertig eingebaut und die wlan Einstellungen getätigt, sollte man nun kontrollieren ob es auch im Heimnetzwerk richtig funktioniert.
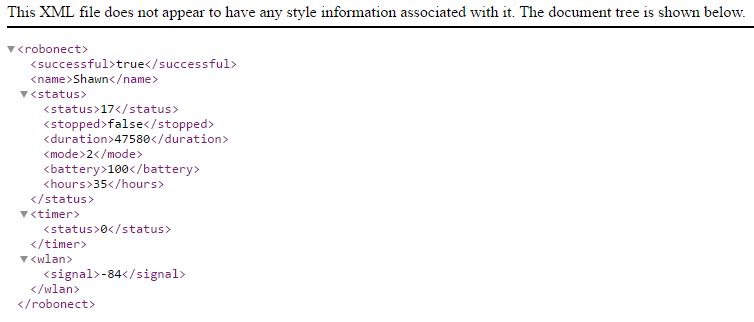
- Dazu führt man folgenden Befehl aus:
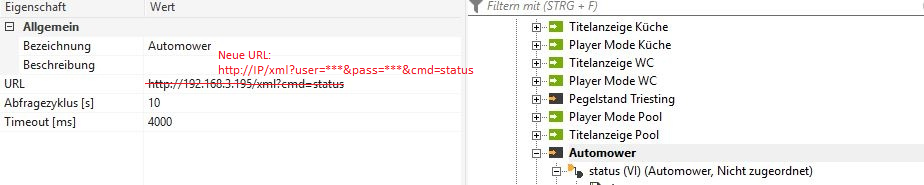
http://ip_des_Mähers/xml?cmd=status←veraltet, es wurde User und Passwort hinzugefügt: http://IP_des_Mähers/xml?user=***&pass=***&cmd=status - Die Rückmeldung sollte so aussehen:
Wenn das soweit geklappt hat machen wir uns an die virtuellen Eingänge:
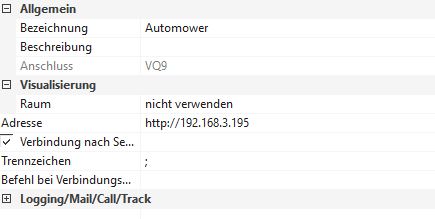
- Als erstes legen wir einen virtuellen http Eingang an:
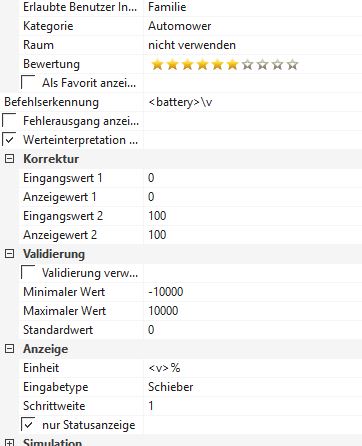
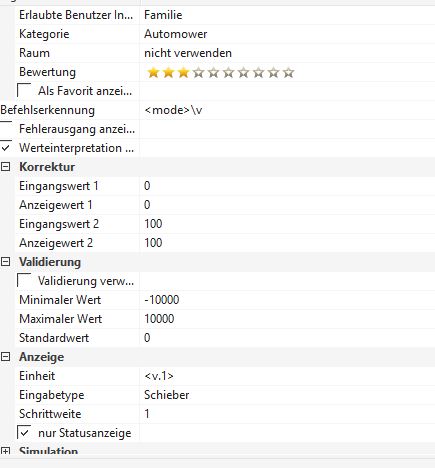
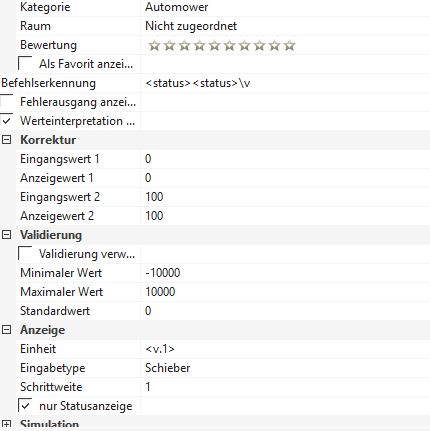
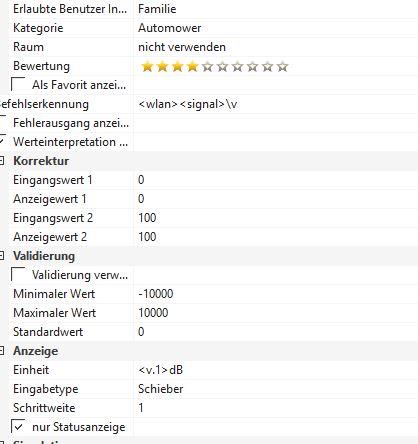
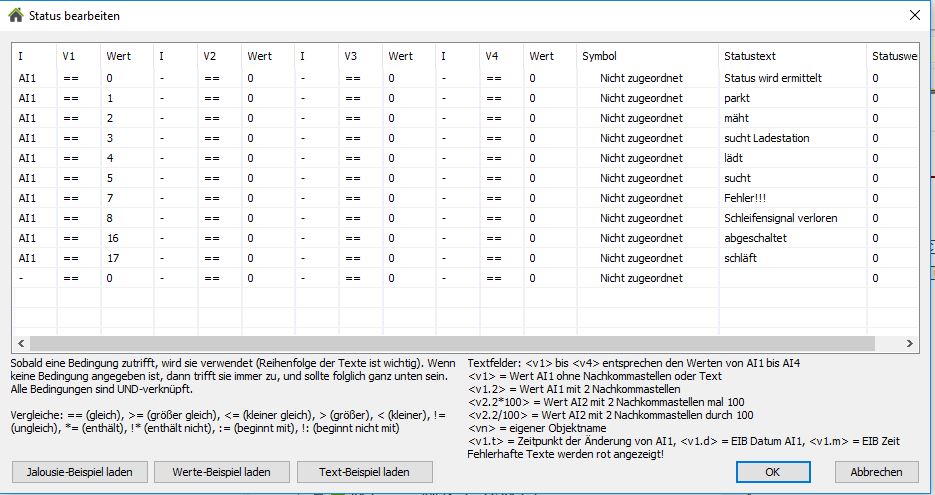
- danach die virtuellen Eingangsbefehle für Batterie, mode, Status, wlan Signal und Betriebsstunden

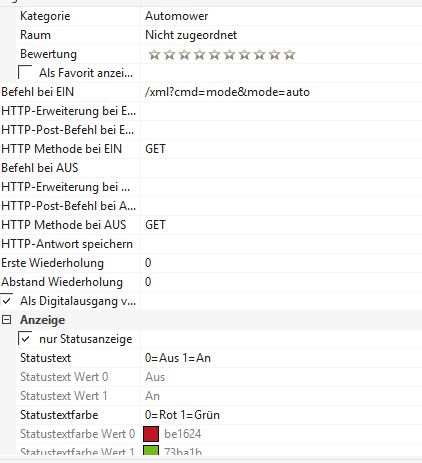
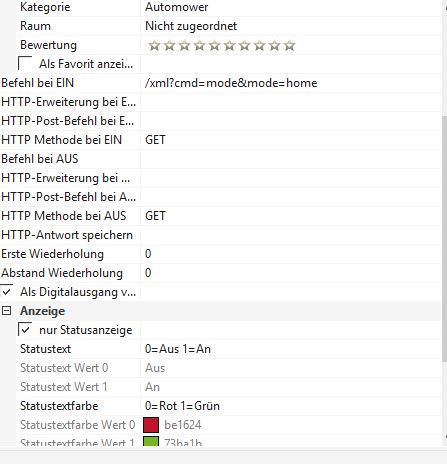
- Und nun noch den virtuellen Ausgang für home und auto. Wichtig dabei ist das kein Timer eingestellt ist. Sonst fährt der Mäher nicht. Oder alle Timer auf on.
- virtueller Ausgang:
- virtuelle Ausgangsbefehle:
- Damit sollte euer Mäher jetzt wunderbar nach Hause fahren oder mähen fahren.
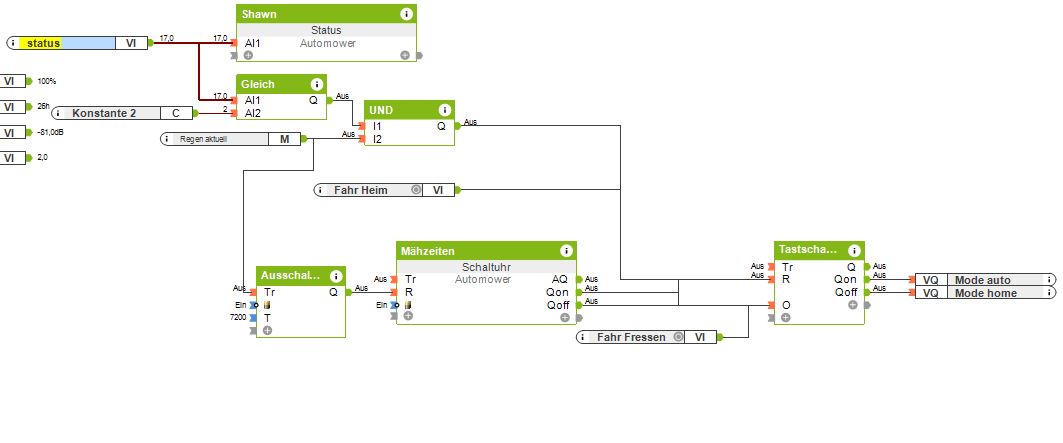
- Ein Beispiel wie es aussehen könnte hänge ich hier auch noch an, der Mäher fährt bei mir bei Regen nach Hause oder verlässt erst gar nicht seine Basis.
- Zu guter letzt gibts noch ein Kategoriesymbol:
